オシロスコープのすべて

オシロスコープの評価

オシロスコープの性能と選び方
必要なオシロスコープの種類を選定してからも、ポータブルやハンドヘルドなど、機種の選択肢は数多くあります。また、オシロスコープを選択する際には、シグナル・インテグリティを達成するために必要な、操作性、サンプル・レート、接続に必要なプローブなど様々な要素を考慮する必要があります。
これらの検討するにあたり、まずは簡単に、操作性やプローブについて、次にオシロスコープの性能に関する用語と注意事項について解説します。ここでアプリケーションに適したオシロスコープの選択に必要な判断基準もご紹介します。
操作性
オシロスコープは、習得が簡単で使いやすく、最高の効率と生産性を提供する必要があります。 これにより、測定ツールではなく、設計に集中できます。 通常の車のドライバが1人ではないように、オシロスコープのユーザも1人ではありません。従来型の機器インタフェース、あるいはWindowsのソフトウェア・インターフェイス、好みはありますが、オシロスコープの操作には柔軟性が重要です。オシロスコープの多くは、様々な操作方法を提供することにより、性能と簡単操作バランスを取っています。典型的なオシロスコープの前面パネル(図60)には、専用の垂直軸、水平軸、トリガのコントロールがあります。
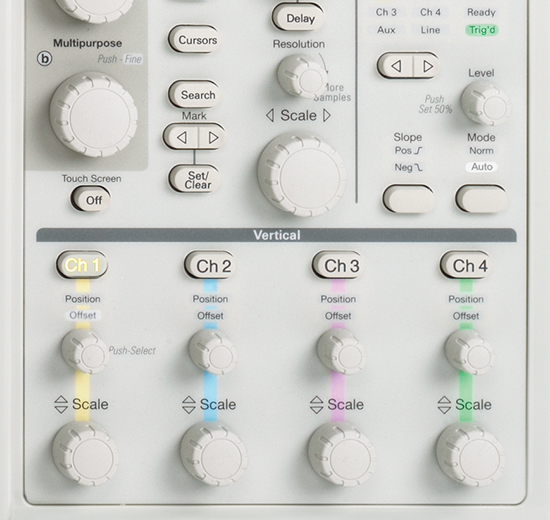
図 60: 従来のアナログ・スタイルの操作部。ポジションや、スケール、輝度など思い通りに正確に設定できます。
測定システム|プローブ
どのように優れた機器でも、そこに入力されるデータ以上に正確 な測定をすることはできません。オシロスコープでは、測定システムに「プローブ」が使用されます。正確な測定はプローブの先から始まります。オシロスコープに最適なプローブで被測定デバイス(DUT)に接続すると、信号をきれいなままオシロスコープに接続するだけでなく、信号を増幅、保持することで、最大のシグナル・インテグリティと測定確度を実現します。プローブの使い方に関してはプロービングの鉄則 【基礎編】をご参照ください。
周波数帯域
周波数帯域は、信号を測定するオシロスコープの基本的な性能です。信号の周波数が高くなると、信号振幅を正確に表示する性能が低下します。この仕様により、オシロスコープが正確に測定できる周波数の範囲が決まります。
オシロスコープの周波数帯域は、入力された正弦波信号がその本来の振幅の70.7%(-3dBポイントと呼ばれる)まで減衰した周波数をさします(図44を参照)。

図44: オシロスコープの周波数帯域は、入力された正弦波信号がその本来の振幅の 70.7%(-3dBポイントと呼ばれる)まで減衰した周波数である
周波数帯域が十分でないと、高周波成分の変化を表示することができず、振幅は低下し、エッジ部分が消えてしまうなど、信号の詳細部分が失われます。このように、周波数帯域が十分でないオシロスコープで波形を観測すると、あまり意味がない結果となるので注意が必要です。
正確な振幅測定を行うために必要な周波数帯域は、「5倍ルール」 によって求められます。

必要とされるオシロスコープの周波数帯域 ≧ 測定信号に含まれる 最も高い周波数成分 × 5
5倍ルール
5倍ルールでオシロスコープを選択すると、誤差は±2%以下となります。通常のアプリケーションでは、この確度で十分です。ただし、信号が高速になるとこの基準を適用できない場合があります。原則として、周波数帯域が高いほど、信号波形をより正確に 表示できるということを覚えておいてください(図45を参照)。

図45: 周波数帯域が高くなるほど、信号波形をより正確に表示できることを示した もので、250MHz、1GHz、4GHzの周波数帯域で取込んだ例
オシロスコープの中には、デジタル信号処理(DSP)により周波 数帯域を拡張できるものもあります。DSPによる任意イコライゼーション・フィルタにより、オシロスコープのチャンネル応答を向上させることもできます。このフィルタにより、帯域を拡張し、オ シロスコープのチャンネルの周波数応答をフラットにし、位相リニアリティと、チャンネル間のマッチングを向上させることができます。さらに、立上り時間が高速になり、時間ドメインのステップ応答も向上します。
立上り時間
デジタル信号の世界では、立上り時間の測定は非常に重要です。パルス波形やステップ波形などのデジタル信号を測定する場合、 立上り時間を考慮する必要があります。高速な信号のトランジションを正確に捉えるためには、オシロスコープは十分高速な立上り時間性能を持っている必要があります(図 46).

図46:高速デジタル信号の立上り時間特性
立上り時間は、オシロスコープの周波数帯域から表すことができ ます。信号の種類に応じたオシロスコープの立上り時間を計算するには、次の式を使います:

オシロスコープの立上がり時間
オシロスコープの立上り時間 ≧ 信号の最も高速な立上り時間÷ 5
オシロスコープの立上り時間を選択するこの式は、周波数帯域の 算出法と似ています。周波数帯域の場合と同様に、この式は、最近のように信号が極端に高速になると、常に適用できるとは限りません。オシロスコープは、立上り時間が速いほど、高速なトランジション部分の詳細な変化をより正確に捉えられるということを 覚えておいてください。
用途によっては、信号の立上り時間しかわからない場合もありま す。この場合、定数kと下の式を使用することにより、オシロスコー プの周波数帯域と立上り時間の関係を知ることができます。

周波数帯域と立上り時間
定数kの値は、0.35から0.45の範囲であり、オシロスコープの周波数特性曲線とパルス応答特性によって変わります。周波数帯域が 1GHz未満のオシロスコープでは通常0.35、1GHzを超えるオシロ スコープでは通常0.40から0.45の間になります。
図47の例のように、ロジック・ファミリの中には特に速い立上り時間を持つものがあります。
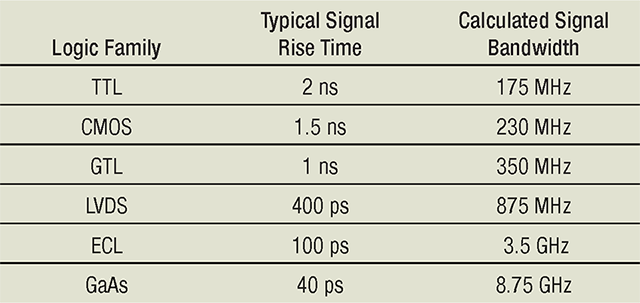
図47: ロジック・ファミリの中には特に速い立上り時間を持つものもある
サンプル・レート
サンプル・レートは、1秒間のサンプル数(S/s)で示され、デジタル・オシロスコープがどの程度の頻度で信号のサンプルを取込 むかを示します。これは映画カメラの1画面のスナップショットが ちょうど1サンプルのアナログ値に相当します。オシロスコープの サンプリングが速いほど(つまり、サンプル・レートが高いほど) 分解能が高くなり、波形もより詳細に表示されるので、重要な情報やイベントが失われることが少なくなります(図48を参照)。

図48: サンプル・レートが高いほど信号の分解能が上り、間欠的なイベントが観測 できる
また、長い時間でゆっくり変化する信号の測定には、最小サンプル・ レートが適しています。一般的に、水平スケールを変更すると、 画面に表示されるサンプル・レートも変更され、表示される波形のレコード長に対し、常に一定のサンプル数を確保するように設定されます。
次に、必要とするサンプル・レートの計算方法を説明します。計算方法は、測定対象の波形の種類および使用するオシロスコープの波形描画方法によって異なります。
信号を正確に再現し、かつエイリアシングを避けるためには、ナイキストの定理によれば最高周波数成分の少なくとも2倍の速さでサンプリングされる必要があります。しかし、この定理は、無限 のレコード長と、連続する信号を想定しています。どのようなオ シロスコープもレコード長を無限に持っている訳ではなく、また 当然グリッチは連続して起きないため、最高周波数成分の2倍の サンプリング・レートでは事実上不十分です。
オシロスコープの立上り時間を選択するこの式は、周波数帯域の 算出法と似ています。周波数帯域の場合と同様に、この式は、最近のように信号が極端に高速になると、常に適用できるとは限りません。オシロスコープは、立上り時間が速いほど、高速なトランジション部分の詳細な変化をより正確に捉えられるということを 覚えておいてください。
Sin(x)/x補間を使用して波形を正確に再現するためには、最低でも信号の最高周波数成分の2.5倍 のサンプル・レートを持ったオシロスコープが必要 になります。直線補間を使用する場合は、最低でも信号の最高周波数成分の10倍のサンプル・レー トが必要になります。
10GS/sのサンプル・レートと3GHzの周波数帯域を持つ測定システムの中には、周波数帯域の5倍までのオーバー・サンプリングによって、非常に高速な単発現象を捉えられるように最適化されているものがあります。
周波数帯域とサンプル・レートの注意点
デジタル・アプローチとは、オシロスコープが安定して、明るく、はっきりとレンジ内の周波数を表示できることを意味します。 繰り返し信号の場合、デジタル・オシロスコープの帯域幅は、オシロスコープのフロントエンド・コンポーネントのアナログ帯域幅の関数であり、一般に–3 dBポイントです。パルスやステップなどのシングルショットや一時的なイベントの場合、帯域幅はオシロスコープのサンプル・レートによって制限される可能性があります。
波形取込レート
どのようなオシロスコープも、連続して波形を取込むのではなく、 1秒間に一定の割合で波形の取込みと休止を繰返し、断続的に信号を捉えます。これを波形取込レートといい、1秒間あたりの波形の表示回数(波形/秒)で表します。サンプル・レートが「入力信号をサンプリングする速さ」を表すのに対し、波形取込レートは「どの程度速く波形を繰返し取込めるのか」という速さを表します。
波形取込レートは、オシロスコープの機種、またそのオシロスコープの性能によって大きく異なります。オシロスコープの波形取込レートが高速であれば、信号を詳細に観測することができ、ジッタ、 ラント・パルス、グリッチ、トランジション・エラーなどの一過性の異常をすばやく捉えられます。
DSOは直列処理アーキテクチャを使用しているので、取込レート は10~5,000波形 /秒程度になります。DSOの中には、バースト的に多くの波形データを取込み、それを長いメモリに格納していく特別なモードを備えるものがありますが、一時的に高い波形取込レートが得られるように見えても、その後に続く長い処理時間(デッド・タイム)のために、発生頻度の低い間欠的現象を 捉える確率はやはり低下してしまいます。
DPOは並行処理アーキテクチャを使用しており、非常に高速な波形取込レートを実現しています。図49に示すように、高性能なDPOは数百万の波形をわずか数秒で取込むことができます。これにより、間欠的で捉えにくい信号を補足する確率が劇的に上り、 信号の中に問題があっても容易に見つけ出すことができます。
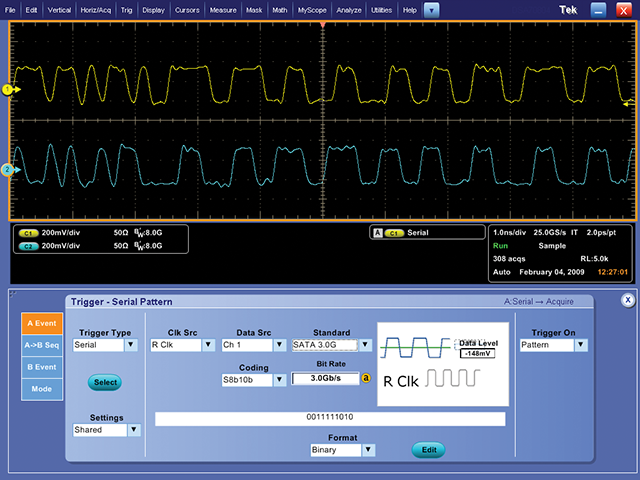
図49: DPOは、繰返し性のない信号、高速信号、マルチチャンネルのデジタル設計 アプリケーションに適している
さ らに、リアルタイム取込みの性能を生かして、振幅、時間、時間 に基づく振幅の分布といった信号の変動特性を3次元で表示する能力もあります。その結果、図50に示すように信号の微細な特性を 非常に詳しく観察できます。
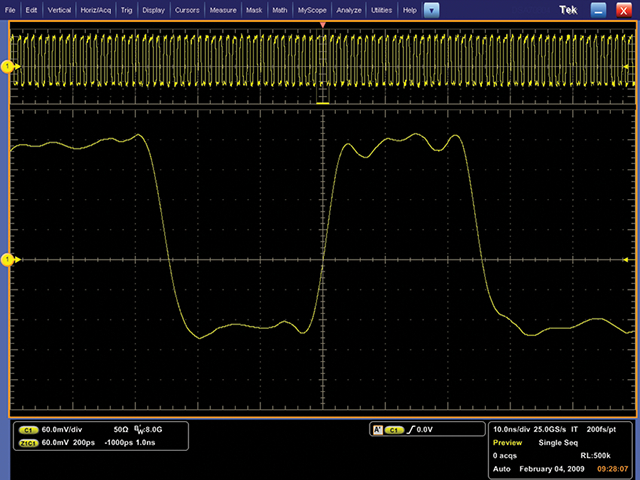
図50: DPOには優れた波形取込レートと3次元表示機能があり、汎用設計やトラブルシュートなど幅広いアプリケーションにおいて信号の詳細観測に最適
レコード長
レコード長は1波形レコードを構成するポイント数で表わされ、 チャンネルごとに取込み可能なデータの総量を示します。保存できるポイント数(データ量)は限られているため、取込める波形の時間幅はオシロスコープのサンプル・レートに反比例します。
波形取込時間
波形取込時間 = レコード長/サンプル・レート
最近のオシロスコープでは、レコード長を選択して最適な波形表示にできるものもあります。安定した正弦波の解析であれば500 ポイントのレコード長で十分ですが、複雑なデジタル・データ・ストリームの中に異常が見られる場合、その原因を特定するため にはレコード長は数百万以上のポイント数が必要となることもあります(図51を参照)。
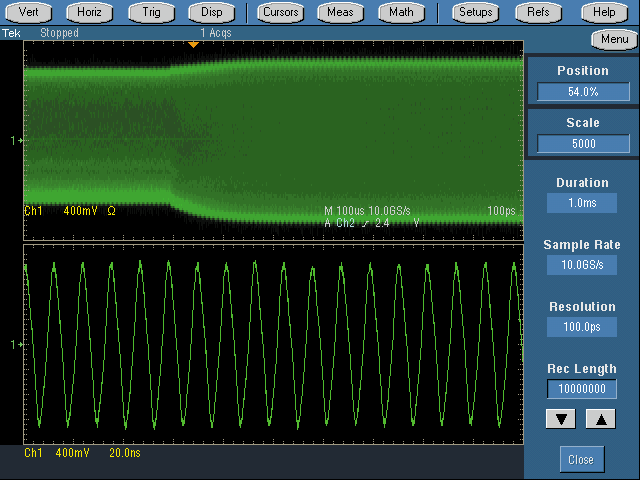
図51: 85MHzの変調搬送波の高周波成分を取込むには、高分解能サンプリング (100ps)が必要。変調エンベロープの観測には長い時間間隔(1ms)が必要。ロン グ・メモリ(10MB)があれば、その両方を表示することができる
トリガ機能
オシロスコープのトリガ機能により、信号の望むポイントに水平掃引の基準点を合せることができます。信号の観測には、この機能は欠かせません。トリガにより繰返される波形を安定表示させることもでき、単発波形を捉えることもできます。
有効ビット
有効ビットは、デジタル・オシロスコープが正弦波信号の形をどこまで正確に復元できるかを示す基準として使われます。有効ビッ トでは、「理想的」なデジタイザに含まれるエラーと、デジタル・ オシロスコープの実際のエラーを比較します。実際のエラーには ノイズや歪みなどが含まれているため、信号の周波数や振幅を指定する必要があります。
周波数応答
オシロスコープの周波数帯域さえ十分に広ければ、高周波信号を 正確に取込めるというものではありません。オシロスコープ設計 の最終目標は、MFED(Maximally Flat Envelope Delay)という周波数応答の実現にあります。この周波数応答を実現すること で、最小のオーバーシュート、リンギングによる優れたパルス忠実度が可能になります。現実のデジタル・オシロスコープには、増幅器、アッテネータ、A/Dコンバータ、内部配線、リレーなど が使用されているため、MFEDに近づけることが設計の目標になります。パルス忠実度は、機種や製造メーカによって大きく異な ります。
垂直軸感度
「垂直軸感度」は、垂直増幅器が微弱な信号をどこまで増幅できるかを示します。これは通常、mV/divで表されます。多くの汎用オ シロスコープで検出できる最小電圧は、画面の垂直軸1目盛あたり 1mVです。
掃引速度
「掃引速度」とは、波形がオシロスコープの画面に表示される速度であり、これを調整することで波形の詳細が観測できるようになります。オシロスコープの掃引速度は、1目盛あたりの時間(秒) で表されます。
ゲイン(垂直軸)確度
ゲイン確度または垂直軸確度は、垂直軸がどれだけ正確に信号を減衰、または増幅できるかを示します。通常はパーセント誤差と して表されます。
時間軸(水平軸)確度
時間軸、または水平軸確度は、時間軸がいかに正確に信号のタイ ミングを表示できるかを表します。通常はパーセント誤差として表されます。
垂直分解能(A/D コンバータ分解能)
A/Dコンバータの垂直軸分解能、つまりデジタル・オシロスコー プの垂直軸分解能は、オシロスコープがどれだけ正確に入力電圧をデジタル値に変換できるかを表します。垂直軸分解能はビット数で表されます。ハイレゾ・アクイジション・モードで示したよ うに、計算によって有効分解能を上げることができます。
タイミング分解能(MSO)
デジタル信号の取込みで重要になるアクイジション仕様が、MSO のタイミング分解能の仕様です。優れたタイミング分解能で信号 を取込むことができれば、信号が変化した際、より正確なタイミン グ測定が可能になります。例えば、500MS/sの取込レートは 2nsのタイミング分解能であり、取込むことのできる信号エッジの確度は2nsになります。タイミング分解能が60.6ps(16.5GS/ s)であれば信号エッジの確度は60.6psになり、より高速な信号 変化を取込むことができます。
デジタル信号を2種類の取込みで同時に取込むことのできるMSO もあります。1つの取込みでは標準のタイミング分解能で、もう1つの取込みでは高分解能で取込みます。長いレコード長では標準 の分解能で取込み、詳細に観測したい部分では高分解能で取込み ます(図52を参照)。
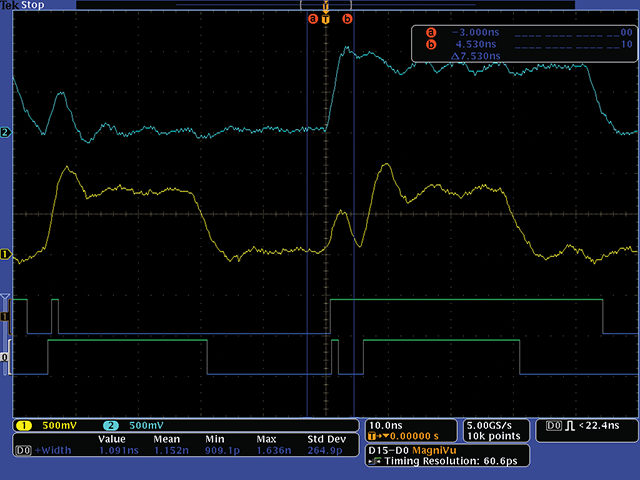
図52: 16のデジタル・チャンネルが統合されているため、アナログ信号とデジタル 信号を、時間相関をとりながら観測、解析できる。高速に取込めるため解像度が高く、 グリッチなどのパルス幅の狭いイベントも観測できる
接続性
測定結果を解析することは、測定同様に重要なことです。計測情報とその結果を、高速の通信ネットワーク上で簡単にかつ頻繁に 共有することの重要性も高まっています。オシロスコープに拡張機能が付いたため、最新の解析機能が利用できるほか、計測結果 の文書化と共有も容易になります。オシロスコープの中には、 GPIB、RS-232、USB、Ethernetやネットワーク通信モジュー ルを利用できるものがあり、多様な機能、設定が利用できます(図 53を参照)。

図53: 最近のモデルでは、USBやEthernetポートが標準で装備されているものも増えている。ディスプレイ用にはDisplay PortやHDMIの採用も増えている。
オシロスコープには、以下のような優れた機能を装備しているものもあります。
- オシロスコープ上での書類の作成、編集、共有(個別の環境に ある機器との同時作動)
- ネットワーク・プリンタや共有ファイルへのアクセス
- Windowsデスクトップへのアクセス
- サードパーティの解析ソフトウェアおよびドキュメント・ソフ トウェアの実行
- ネットワークへのリンク
- インターネットへの接続
- Eメールの送受信
拡張性
オシロスコープは、ニーズの変化に合せて拡張できる必要性があります。オシロスコープによっては、以下のような拡張が可能です。
- メモリを拡張し、長いレコード長の解析を可能にする
- アプリケーションに特化した測定機能の追加
- 豊富なプローブ、モジュールの追加によるオシロスコープの機能強化
- 周波数帯域の拡張
- Windows対応のソフトウェアの実行
- バッテリ・パック、ラックマウントなどのアクセサリの追加
アプリケーション・モジュールとソフトウェアを使用すれば、オシロスコープをジッタやタイミングの解析、マイクロプロセッサ のメモリ・システム検証、通信規格の検査、ディスク・ドライブ の測定、ビデオ測定、電力測定など、さまざまな機能を実行する ための高度に専門化された解析ツールとして使用できます。図54 ~59にその例を示します。
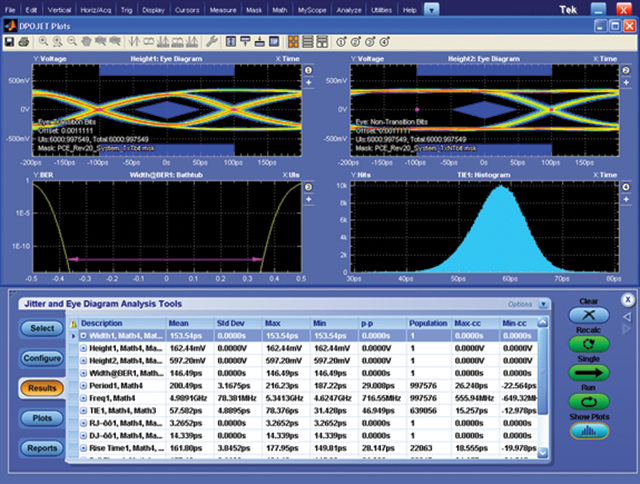
図54:解析ソフトウェアは、最新のハイスピード・デジタル設計で必要となるジッタ/アイ・ダイアグラム測定に最適
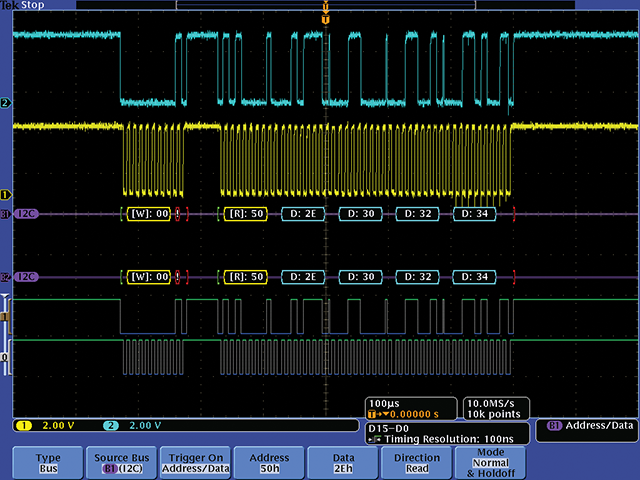
図55: シリアル・パケットの内容での自動トリガ、デコード機能、サーチ機能により、 シリアル・バス解析が効率良く行える

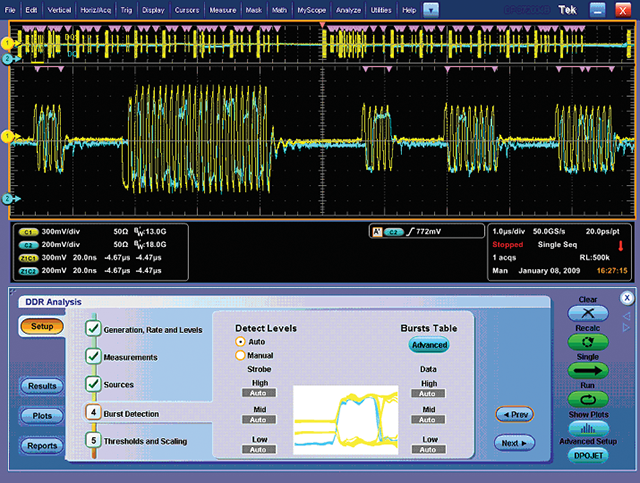
図57: DDR解析ソフトウェアにより、リード/ライト・バーストを分離し、JEDEC 対応の測定を実行するなど、複雑なメモリ設計検証の自動化が可能
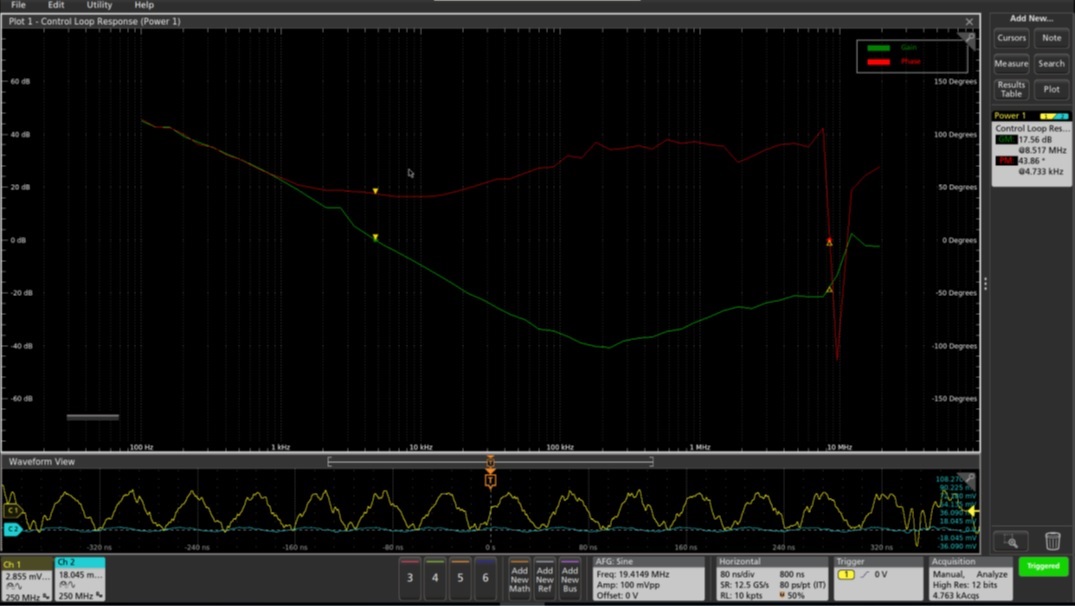
図58: 電源制御ループ応答解析(ボード線図)により、スイッチング電源やパワーレーンの評価、解析が可能に。
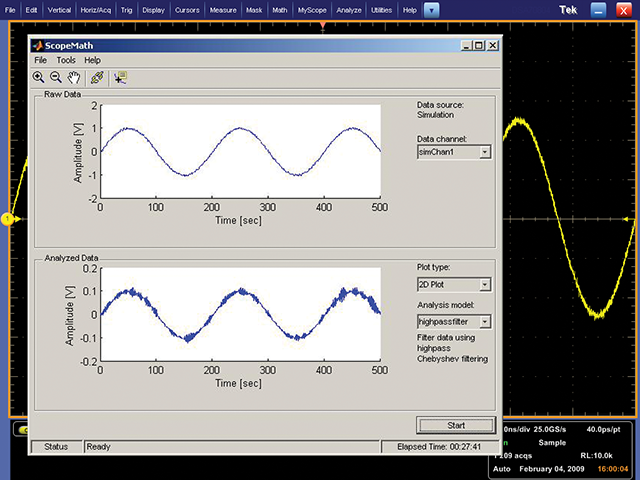
図59: WindowsベースのオシロスコープにはMATLAB®などの解析ソフトウェアが インストールできるため、ローカルでの信号解析が可能
使いやすさ
効率良く、高い生産性で作業するためには、オシロスコープは覚えやすく使いやすいものでなければなりません。計測器に気をとらわれるのではなく、設計に集中できるようなものでなければなりません。車の運転がひとりひとり違うのと同様に、オシロスコープの使い方もユーザによって異なります。従来のオシロスコープのように計測器の前面パネルから操作するものがあったり、Windows®インタフェースで操作するものがあったりしますが、重要なことはその使いやすさです。
多くのオシロスコープは、ユーザにさまざまな操作方法を提供することで、高い性能と簡単な操作を両立させています。図60に示すように、前面パネルには通常、垂直軸、水平軸、トリガ関連の操作部があります。

図60. アナログ・オシロスコープのようなノブ操作、感度、輝度調整により、正確な操作が可能
図61のように、アイコンによるグラフィック・ インタフェースでは、高度な機能を直感的に使用できます。
![]()
図61. グラフィカル・コントロール・ウィンドウにより、複雑な機能も簡単に操作 できる
図62のようなタッチパネル・ディスプレイでは、キーボードの置き場を気にすることなく、画面上のボタンに簡単にアクセスできます。
![]()
図62. タッチパネルによる操作では、狭い作業台や台車を気にすることなくスクリーン 上で操作できる
オンライン・ヘルプは、画面上で参照できるリファレンス・マニュアルです。直感的な操作により、日ごろあまりオシロスコープを使わないユーザでも、車を運転するように容易にオシロスコープを操作でき、常にオシロスコープを使っているユーザは、簡単に高度な機能を使いこなせます。さらに、図63のように多くのオシロスコープは持ち運びが可能なため、実験室や現場など、さまざまな操作環境で効率的に使用できます。
![]()
図63. 多くのオシロスコープはポータブル・タイプであるため、さまざまな作業環 境で使用できる