
はじめに
本アプリケーション・ノートの概要
- CAN / CAN FD、LIN、FlexRayの物理レイヤとパケット構造の概要から、トラブルシュートに役立つ詳細な情報を説明します。
- CAN / CAN FD、LIN、FlexRayのデコード機能を装備したオシロスコープのデコード設定方法を説明します。
- デコード機能を備えたオシロスコープでデコードされたシリアル・バスのデータの読み方を説明します。
- トリガ/サーチのオプション機能について説明します。
テクトロニクスのオシロスコープにシリア ル・トリガ/解析のオプション機能を装備す ると、CAN、LIN、FlexRayバスに携わる組込 みシステム・エンジニアのための強力なツー ルになります。このアプリケーション・ノー ト で は、5シリーズMSOを 使 用し たCAN、 LIN、FlexRayシリアル・バスのデコードとト リガを説明します。
自動車業界で組込みシステムのアプリケーションが急速に拡がっていま す。多くの自動車設計エンジニアは、ECU(Electronic Control Unit)間、 ECUとセンサ、アクチュエータ、ディスプレイ間の通信にCAN、LIN、また はFlexRayを使用しています。これらのバスは、ブレーキ・システムからイン フォテインメント・システムまでの重要なサブシステム間のリアルタイム 通信に欠かせません。
CAN、LIN、FlexRayは比較的成熟したバス・プロトコルであり、堅牢で統 合しやすく設定されています。そうであったとしても、ノイズ、基板レイ アウト、電源のオン/オフのタイミングで通信は影響を受けることがあり ます。具体的には、過度のバス・エラーやロックアップなどがあります。ベー シックなプロトコル・アナライザと違い、プロトコル・デコード機能を備 えたオシロスコープは、デコードされたバス・トラフィックが観測できる だけでなく、信号品質まで確認できます。バス信号とデコードされたトラ フィックが観測できるオシロスコープは、トラブルシュートに欠かせない ツールです。
より重要なこととして、オシロスコープはシステムレベル問題のトラブル シュートで使用できます。自動車はセンサ、アクチュエータ、ディスプレ イの大きなネットワークに依存しており、多くの問題はI/Oのイベントまた は値に関連したバス・タイミングに起因します。オシロスコープは、I/O信 号とバス・トランザクションの同時観測に適しています。この機能がある ため、オシロスコープはシステムレベルのデバッグに最適なツールと言え ます。
サポート可能なシリアル・バス規格は、オシロスコープによって異なります。オシロスコープによって可能なバスについては、付録Aまたは当社Webサイト ご覧ください。
車載ネットワークの計測に関するご相談はこちらCANとは?
CAN(Controller Area Network )は、1980年代 に Robert Bosch GmbH社により、電気的ノイズの多い環 境におけるデバイス間の低コストの通信バスとして開 発されました。1992年、メルセデス・ベンツ社は、自 動車システムで初めてCANを採用しました。今日では、 ほとんどすべての自動車メーカがCANコントローラ、 ネットワークを採用しており、さまざまなECUを制御 しています。CANは、エンジンのタイミング・コント ロール、アンチロック・ブレーキ・システム、パワー・ トレイン・コントロールなどの基本的なバスとして使 用されています。また、電気ノイズ耐性、少ない配線、 優れたエラー検出機能、高速データ転送などにより、 CANは産業用制御システム、海洋産業、航空宇宙産 業などのアプリケーションでも急速に拡がりつつあり ます。
自動車のネットワークがさらに数多くの機能をサポー トするように進化したため、ノード間における高速な データ通信のニーズが高まってきました。これを受け、 最高データ・レート1Mbps、ペイロード・データ8バ イトのCANに比べて最高データ・レート8Mbps、ペイ ロード・データ64バイトを実現した、CANのハイスピー ド版であるCAN FDが登場しました。CAN FDの最初の バージョンは2012年に発表されましたが、2015年に はISO CAN FDというISO規格にアップデートされまし た。ISOバージョンでは、セーフガードが追加された ことで通信の信頼性を改善しています。元々のバー ジョンは現在では非ISO CAN FDとして知られており、 ISO CAN FDとの互換性はありません。
CANの動作原理
CAN/CAN FDバスは、シールド・ツイスト・ペア(STP)、非シールド・ツ イスト・ペア(UTP)、リボン・ケーブルなどを使用した、平衡(差動)2線 式インタフェースです。各ノードは、オスの9ピンDコネクタを使用します。 さまざまなデータ・レートが規定されており、CANでは最速1Mbps、CAN FDでは8Mbpsです。すべてのモジュールは最低20kbpsをサポートする必 要があります。通常、システム内のすべてのデバイスは均一で固定のビッ ト・レートで情報を伝送します。最大のケーブル長は、使用されるデータ・ レートによって異なります。最大ライン長は、ロースピードでは数千m、 1Mbpsでは40mが代表値です。ケーブル端では、終端抵抗を使用します。
NRZ(None Return Zero)ビット・エンコードとビット・スタッフィングに より、数少ない伝送と優れた雑音耐性を実現しています。CANバス・イン タフェースでは非同期伝送を使用し、バスが空いている場合は、どのノー ドでも伝送を開始できます。メッセージは、ネットワーク上のすべてのノー ドに配信されます。複数のノードが同時にメッセージを伝送すると、IDの ビット単位のアービトレーションにより優先度の高いメッセージを決定し ます。メッセージは以下の4種類になります。
| メッセージの種類 | 概要 |
| データ・フレーム | データ伝送で使用 |
| データ・フレーム、リモート・フレー | ムは、各フレームの最初と最後にあるスタート・ビットとストップ・ビットで制御され、アービトレーション・フィールド、コントロール・フィールドデータ・フィールド、CRCフィールド、ACKフィールドを含んでいます。 |
| リモート・トランスミッション・リクエスト(RTR)フレーム | データ・リクエストで使用 |
| エラー・フレーム | エラーを検出したノードはエラー・フレームを送信し、バス上のすべてのノードは現在のメッセージが不完全であるとみなし、送信したメッセージは再送信されます。 |
| オーバーロード・フレーム | 受信デバイスにより送信され、データを受信する準備ができていないことを示します。 |
データ/リモート伝送リクエスト・フレームの構造
| CAN 2.0 | SOF 1ビット |
アービトレーション・フィールド 11ビット(標準ID) 29ビット(拡張ID) |
コントロール・フィールド 6ビット |
データ・フィールド 0~8バイト |
CRCフィールド 16ビット |
ACK 2ビット |
EOF 7ビット |
INT 3ビット |
| CAN FD | SOF 1ビット |
アービトレーション・フィールド 12ビット(標準ID) 32ビット(拡張ID) |
コントロール・フィールド 8または 9ビット |
データ・フィールド 0~64バイト |
CRCフィールド 18または 22ビット |
ACK 2ビット |
EOF 7ビット |
INT 3ビット |
| フィールド | 概要 |
| SOF | CAN、CAN FD共通であり、SOF(Start Of Frame)ビットでフレームは開始します。 |
| Arbitration | アービトレーション・フィールドは、識別子(アドレス)とRTR(Remote Transmission Request)ビットを含み、データ・フレームとリクエスト・フレーム(リモート・フレームとも呼ばれる)を区別します。識別子には、標準フォーマット(11ビット、バージョン2.0A)と拡張フォーマット(29ビット、バージョン2.0B)があります。CAN FDでは、標準/拡張フォーマットでCANと同じアドレス(11ビットIDまたは29ビットID)を共有しますが、RTRビットを外してドミナントr1ビットを維持します。 |
| Contro | CANのコントロール・フィールドは、CAN 2.0A(11ビット識別子)標準フレームとCAN 2.0B(29ビット識別子)拡張フレームを区別するための1ビットの識別拡張子(IDE)ビットとデータ長コード(DLC)4ビットおよび1ビットのr0を含む6ビットで構成されます。コントロール・フィールドに含まれるDLCの4ビットは、データ・フレームのデータ・フィールドに含まれるバイト数、またはリモート・フレームによってリクエストされるバイト数を示します。CAN FDではコントロール・フィールドで8または9ビットを使用し、CANと同様にIDE、r0、DLCビットも使用します。CAN FDではEDL、BRS、ESIのビットも追加され、EDL(ExtendedData Length)はパケットがCANかCAN FDかを識別し、BRS(Bit Rate Switch)はデータ・フェーズでビット・レートをスイッチするかどうかを示し、アービトレーション・フェーズとデータ・フェーズを分離します。CAN FDでは、同じ4ビットのDLCが8バイト以上のデータ長の指定でも使用されます。 |
| Data | データ・フィールドは、0〜8バイトのデータからなります。CAN FDは0~8バイトをサポートしますが、12、16、20、32、48または64バイトもサポートされます。 |
| CRC | CANで使用される15ビットのCRCコードとリセッシブ・デリミタ・ビットです。CAN FDでは16バイト以下のペイロードで17ビット(+CRCデリミタ・ビット)を、16バイト以上では21ビット(+CRCデリミタ・ビット)を使用します。CAN FDでは、4つのスタッフ・ビットが追加されます。 |
| ACK | アクノリッジ・フィールドは2ビット長。最初はスロット・ビットで、リセッシブとして送信され、他のノードから正常にメッセージを受信した場合は送信されたドミナント・ビットにして上書きされます。二番目のビットはリセッシブ・デリミタ・ビットです。CAN FDでは少し異なり、レシーバは有効ACKとして2ビットの時間を識別します。 |
| EOF | 7ビットのリセッシブ・ビットで、フレームの終了(End Of Frame)を示します。 |
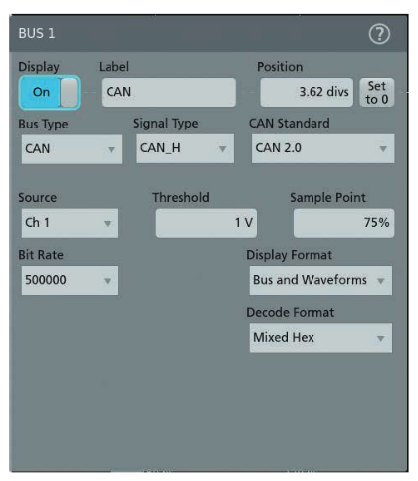
CAN / CAN FDバスのデコード設定
CANのデコード/トリガ機能を装備したテクトロニクスのオシロスコープの場合、前面パネルのBusボタンを押すと、オシロスコープ入力をバスとして設定できます。転送される情報をデコードするには、以下の基本パラメータを入力します。
- CAN規格
- 信号の種類
- 入力チャンネル
- ビット・レート
- 電圧スレッショルド
- サンプル・ポイント(ビット時間のパーセント)
CANバスは差動信号です。シングルエンド・プローブでバスを取込み、デコードすることもできますが、差動プローブを使用すると、信号忠実度が増し、ノイズ耐性が上がります。
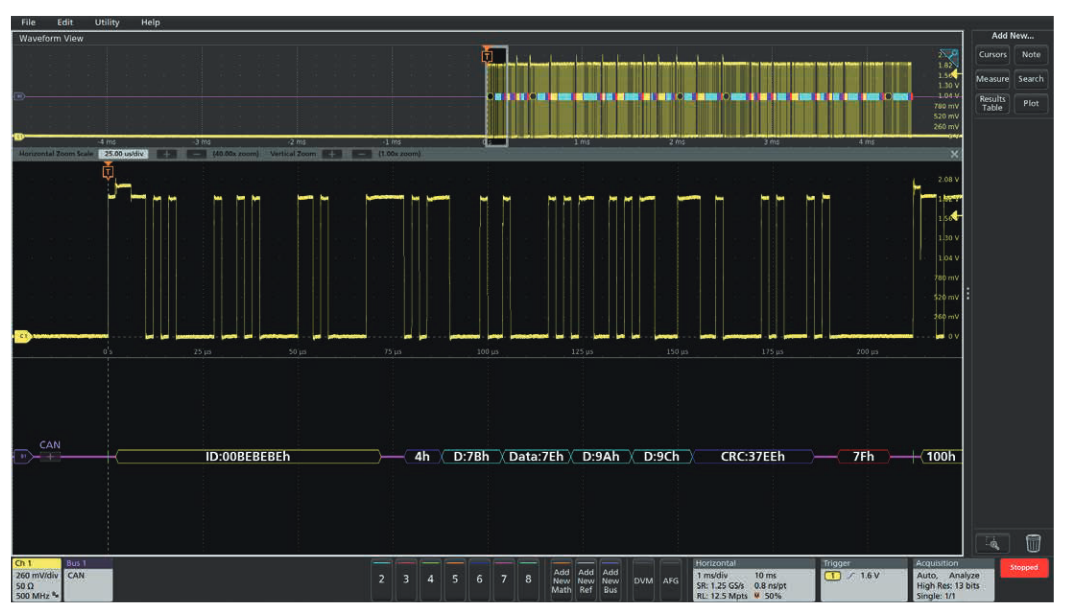
CAN / CAN FDバス情報の読み方
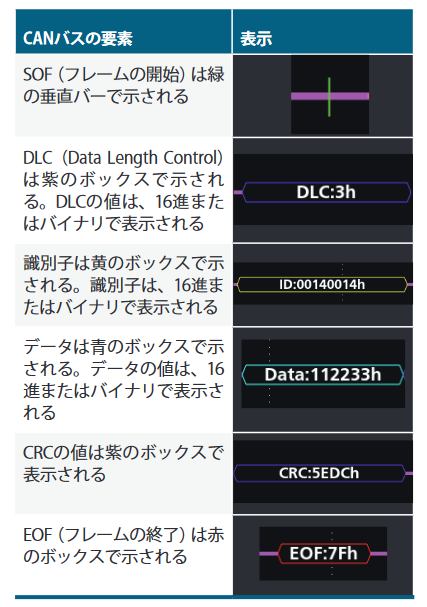
デコードされた波形は、色識別されたグラフィックでCANメッセージの要素を示します。
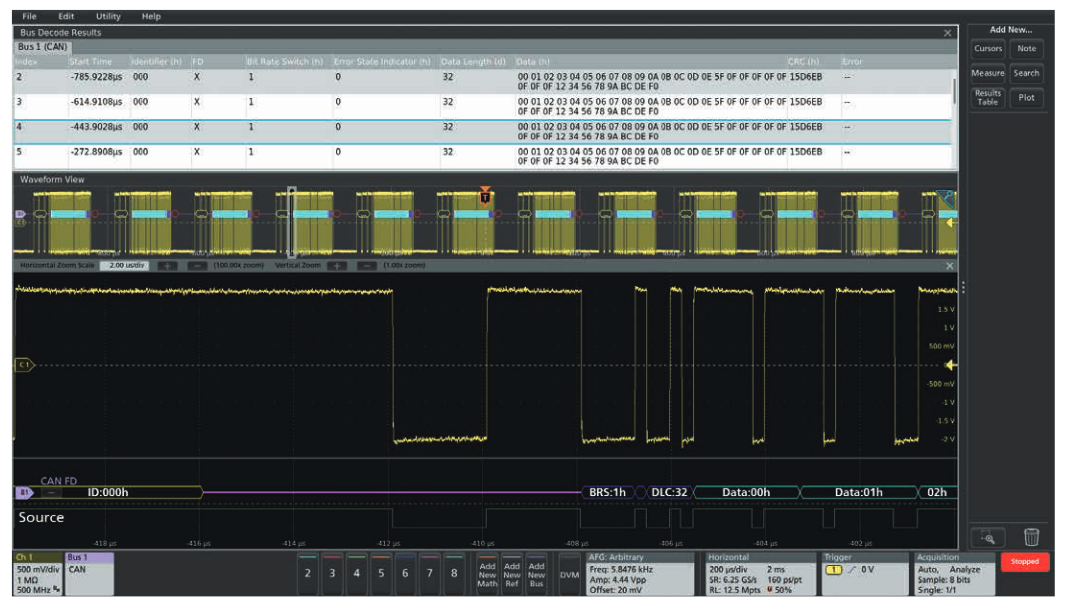
ファームウェアを担当するエンジニアにとっては、Results Tableの形式の方が便利かもしれません。バスの動きがタイムスタンプとともに表示されるため、ソフトウェアのリストとの比較が容易で、実行速度が簡単に計算できます。
Results Tableは、波形表示とリンクしています。表の行をタップすると、オシロスコープは対応するバス信号、デコードされたバス波形を自動的にズームして、ディスプレイ下部に表示します。
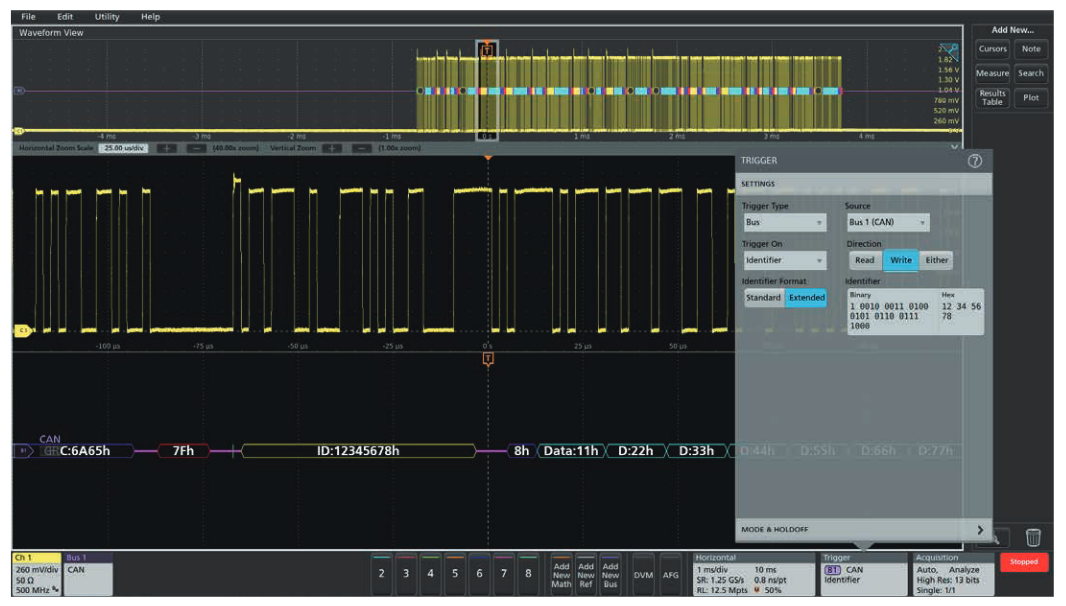
CANバスのトリガ
特定のバスの動作でトリガし、取込むことができるた め、オシロスコープはシステムレベルのデバッグには 欠かせないツールです。バス・トリガが正しく設定さ れると、オシロスコープは特定のバスの動作に同期 したすべての入力信号を取込みます。この例では、 拡張識別子12345678(hex)への書込みにトリガして います。
CAN / CAN FDバス・トリガでは、右に示すトリガ・タイプが用意されています。
| トリガ対象 | 概要 |
| Start of Frame | 任意のSOFフィールドにトリガします。 |
| Frame Type | データ・フレーム、リモート・フレーム、エラー・フレーム、またはオーバーロード・フレーム |
| FD Bits | FDビット・レート・スイッチ・ビット、FDエラー・ステート、インジケータ・ビット |
| Identifier | 特定の11または29ビットの識別子の値とリード/ライトのクオリフィケーション |
| Data | ユーザ指定のCANデータ |
| Missing Ack | 受信デバイスがAckを出力しない場合にトリガします。 |
| Bit Stuffing Error | ビット・スタッフィング・エラーが検出されるとトリガします。 |
| FD Form Error | FDフレーム・フォーマットにエラーがあるビットでトリガします。 |
| Any Error | Missing Ack、Bit Stuffing、FD Formエラーにトリガします。 |
| End of Frame | 任意のEOFフィールドにトリガします。 |
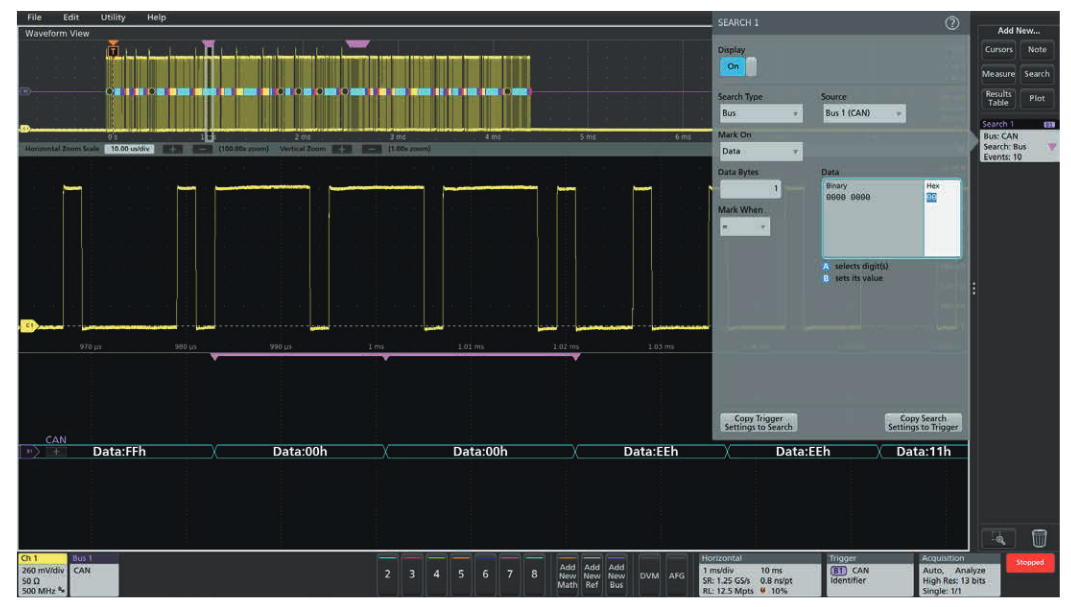
CANバスの検索
CAN / CAN FDのデコード機能を装備したテクトロニクスのオシロスコープには Wave Inspectorによるサーチ機能があり、検索条件に合ったすべてのバス・イベン トを探し出すことができます。また、それがいくつ発生しているのかもわかります。 設定はバス・トリガの設定と同様であり、特定のバス・イベントを検出し、そのす べてにマークを付けます。この例では、データの値00 hexを自動的に検索するよう に設定しています。10個が検出され、マークが付いています。
LINとは?
LIN(Local Interconnect Network)バスは、CANではコスト、汎用性、スピードのスペックが過剰である場合のCANの代替として1999年にLINコンソーシアムによって開発された規格です。アプリケーションとしては、ウィンドウ・コントロール、ドア・ロック、雨滴センサ、ワイパ・コントロール、空調コントロールなどにおける、センサとアクチュエータ間の通信があります。
しかし、優れた電気ノイズの耐性、エラー検出機能、高速データ転送などのため、エンジンのタイミング・コントロール、アンチロック・ブレーキ・システム、パワー・トレイン・コントロールなどではCANが使用されています。
LINの動作原理
LINバスは、ISO9141規格を拡張した、ローコスト、1線式の接続です。LINの ネットワークは、1つのマスタと1つまたはそれ以上のスレーブからなります。 すべてのメッセージはマスタから発行され、各メッセージにはただ1つのス レーブが応答します。このため、CANのような衝突検出やアービトレーション 機能は必要ありません。UART/SCIをベースに、8ビット、スタート付き、ストッ プ付き、パリティなしで最大8バイトのデータを送ります。データ・レート は1kbps〜20kbpsです。遅いようですが、特定のアプリケーションには適し ており、EMIも抑えられます。
LINバスは、常にアクティブかスリープのどちらかの状態をとります。アク ティブの状態では、バス上のすべてのノードはウェイクアップの状態であり、 バスのコマンドを待ち受けます。バス上のノードは、マスタがスリープ・フ レームを発行するか、あらかじめ設定された時間、バスに情報が来ない場合 にスリープに入ります。ノードがウェイクアップをリクエストするか、マスタ・ ノードがブレーク・フィールドを発行するとウェイクアップします。
LINのフレームは、ヘッダとレスポンスで構成されます。ヘッダはマスタによって出力され、レスポンスはスレーブによって出力されます。ヘッダとレスポンスは、それぞれがサブコンポーネントを持っています。
| ヘッダ・コンポーネント | 概要 |
| Break Field | ブレーク・フィールドは、新しいフレームの開始信号として使用されます。すべてのスレーブ・デバイスをアクティブにし、ヘッダの残りの部分を受信するように指示します。 |
| Sync Field | 同期フィールドはスレーブ・デバイスによって使用され、マスタ・ノードで使用されるボー・レートを決定し、順次同期します。 |
| Identifier Field | 識別子はどのスレーブ・デバイスがアクションを起こすかを指定します。 |
| レスポンス・コンポーネント | 概要 |
| Data | 指定されたスレーブ・デバイスが1〜8バイト・データで応答します。 |
| Checksum | データ伝送におけるエラー検出のために使用される演算フィールドです。LIN規格は何種類かのバージョンで進化しており、2種類の異なったチェックサムを使用しています。標準チェックサム(Classic checksum)はデータ・バイトのみで計算され、バージョン1.xのLINシステムで使用されます。拡張チェックサム(Enhanced checksum)はデータ・バイトと識別子フィールドで計算され、バージョン2.xのLINシステムで使用されます。 |

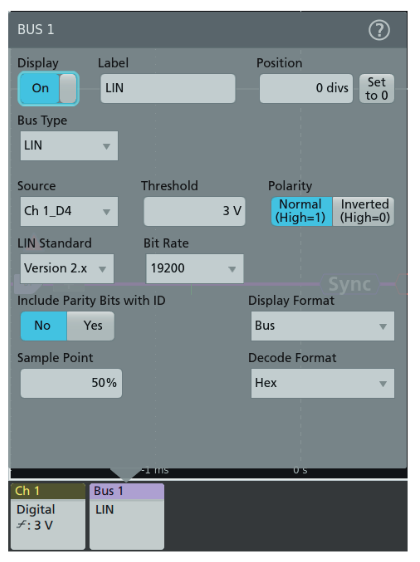
LINバスのデコード設定
LINのデコード/トリガ機能を装備したテクトロニクスのオシロスコープの場合、前面パネルのBusボタンを押すと、オシロスコープ入力をバスとして設定できます。転送される情報をデコードするには、以下の基本パラメータを入力します。
- 入力チャンネル
- 使用するLINのバージョン
- ビット・レート
- 極性
- スレッショルド
- どこでサンプルするか(ビット時間のパーセント)
LINの信号は受動プローブまたはアクティブ・アナログ・プローブでも取込めますが、デジタル・ロジック・プローブでも取込むことができます。
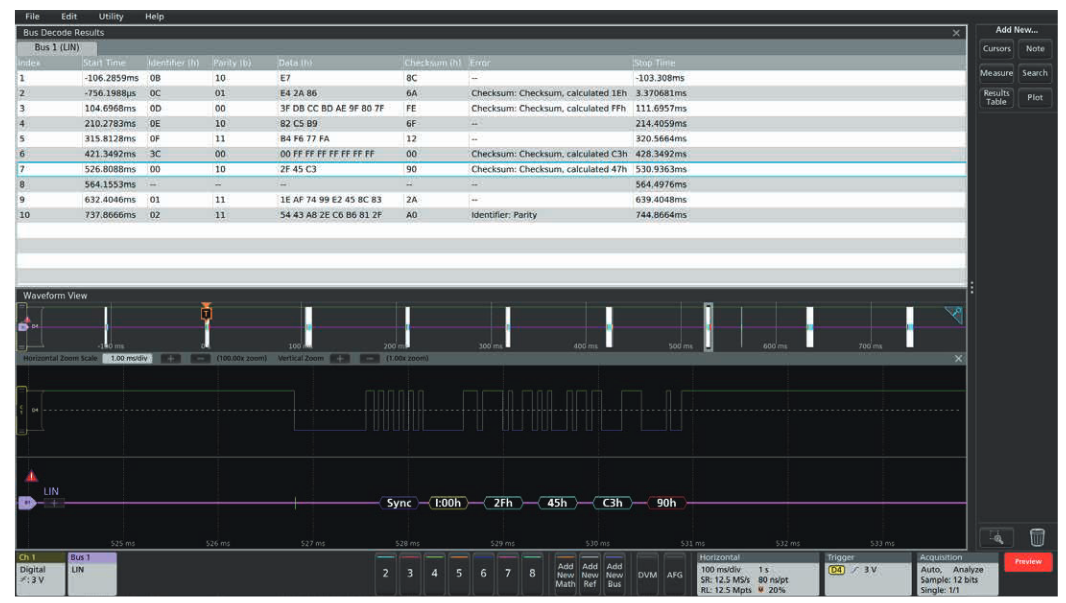

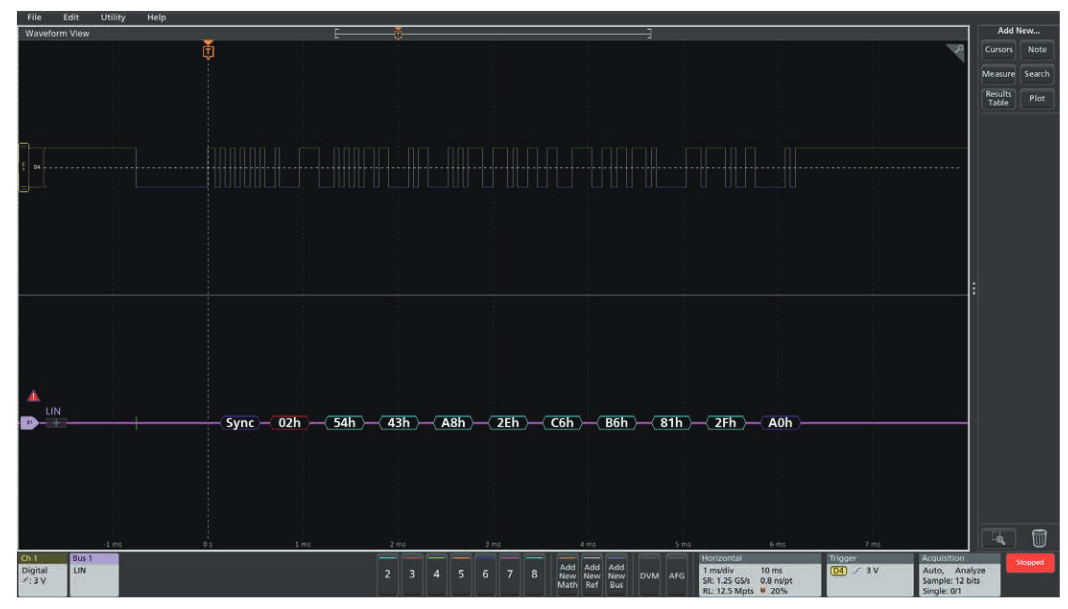
LINバスの読み方
デコードされたバス波形は、LINメッセージの要素を示しています。
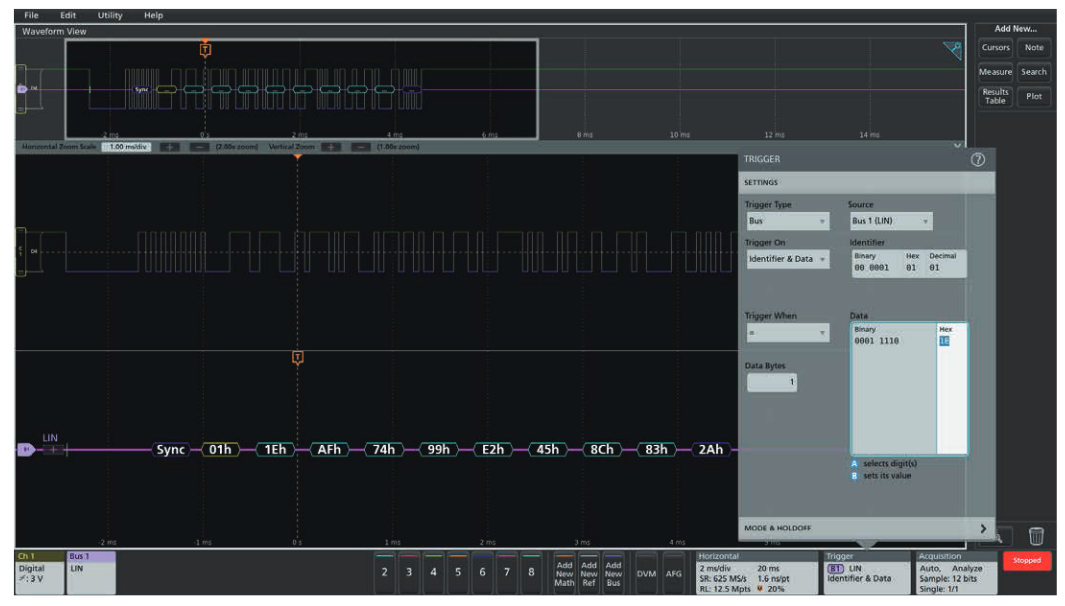
LINバスのトリガ
LINバスが正しく設定されると、オシロスコープはバス・トリガ・イベントの発生にしたがってすべての入力信号を取込むことができます。この例では、識別子01 hexの後にデータの値1E hexが続く場合にトリガします。
LINバス・トリガでは、以下に示すトリガ・タイプが用意されています。
| トリガ対象 | 概要 |
| Sync | 同期フィールドにトリガします。 |
| Identifier | 特定の識別子にトリガします。 |
| Data | 特定のデータの値またはデータ・レンジにトリガします。 |
| Identifier & Data | 識別子とデータの組合せでトリガします。 |
| Wakeup Frame | ウェイクアップ・フレームにトリガします。 |
| Sleep Frame | スリープ・フレームにトリガします。 |
| Error | 同期エラー、IDパリティ・エラーまたはチェックサム・エラーにトリガします。 |
これらのトリガにより、LINバスで特定のイベントを迅速に探し出すことができます。さらに、結果一覧表、Wave Inspectorなどの優れたシリアル機能により、LINをベースとしたオートモーティブ回路設計のデバッグが簡単に行えます。
FlexRayとは?
FlexRayはCANやLINよりも新しい、次世代の作動バスです。 自動車が小型化し、電子回路が自動車のアプリケーションに組込まれるようになる と、CAN、LINなどの既存の車載用シリアル規格では、ブレーキバイワイヤ、ステ アバイワイヤなどのX-by-Wireアプリケーションで求められる速度、信頼性、冗長 性が得られなくなりました。現在では、これらの機能は主にメカニカル・システム や油圧システムで実現されています。将来は、センサ・ネットワークや、自動車の コストを下げるだけでなく、予測ブレーキング、衝突回避、車間距離適応走行制御 システムなど、電気回路がベースとなった機能によって同乗者の安全性を高めるこ とのできる信頼性の高い電気回路に置き換わることになります。
FlexRayの動作原理
FlexRayは、シールド・ツイスト・ペア(STP)またはアンシールド・ツイスト・ペア (UTP)を使う差動バスで、最高10Mbpsのスピードがあります。これは、LINの 20kbps、CANの1Mbpsに比べても際立った速度です。FlexRayはデュアル・チャン ネル・アーキテクチャを使用しており、大きな利点が2つあります。一つは、2つの チャンネルを構成して、x-by-wireなど、安全性が重要となるアプリケーションにお いては冗長性の高い通信により確実にメッセージが届きます。もう一つは、それほ ど安全性が重要とならないアプリケーションでは、2つのチャンネルを構成して各 チャンネルに独自の情報を10Mbpsで送ることができ、全体のバス転送レートは 20Mbpsになるということです。
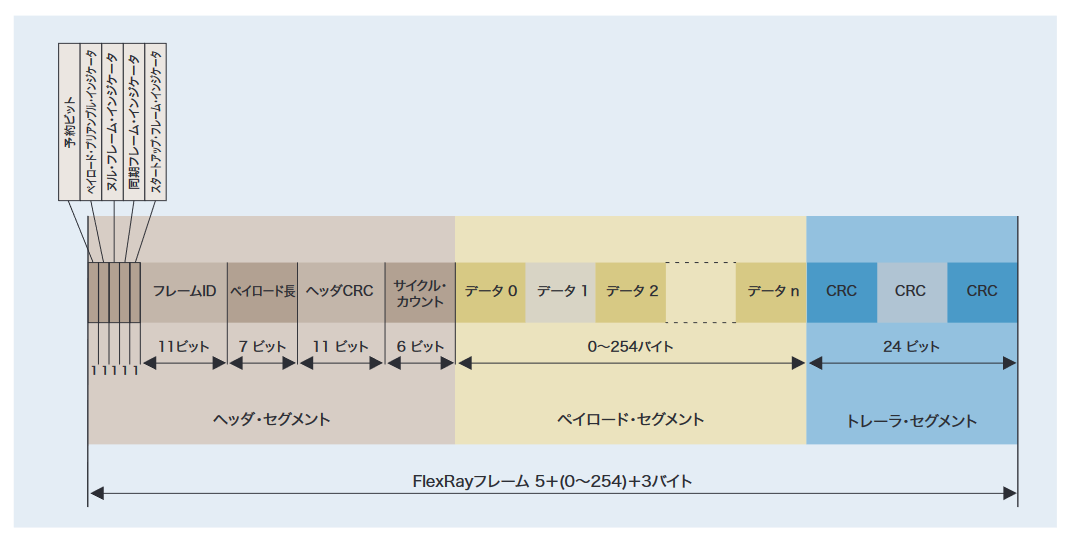
FlexRayは、静的フレームと動的フレームの両方を含むコミュニケーション・サイク ルによる同期および非同期プロトコルの利点を持ったタイム・トリガ・プロトコル を使用しています。静的フレームは、バスの各デバイスであらかじめ決められたタ イム・スロット、各サイクルで通信されます。各デバイスは、長さ(と時間)が変 化するダイナミック・フレームにより各サイクル時に通信する機会も与えられます。 FlexRayのフレームは、ヘッダ・セグメント、ペイロード・セグメント、トレーラ・ セグメントという3つのセグメントで構成されます。それぞれのセグメントは、以 下に示すような独自のコンポーネントを持っています。
動的フレームには、トレーラのCRCの後に、DTS(Dynamic Trailing Sequence、動的トレーリング・シーケンス)と呼ばれるコンポーネントが追加されており、バス・レシーバによる早過ぎるチャンネル・アイドル検出を防ぐことができます。
| ヘッド・セグメントのコンポーネント | 概要 |
| Indicator Bits | 最初の5ビットはインジケータ・ビットと呼ばれ、転送されるフレームのタイプを示し、ノーマル、ペイロード、ヌル、シンク、スタートアップがあります。 |
| Frame ID | フレームIDはフレームが転送されるスロットを規定します。1〜2047の値をとり、使用される個々のフレームIDはコミュニケーション・サイクルにおいて各チャンネルで一度以上使用されます。 |
| Payload Length | ペイロード長フィールドは、ペイロード・セグメントで使用されるデータ・ワード数を示します。 |
| CRC | 同期フレーム・インジケータ、スタートアップ・フレーム・インジケータ、フレームID、ペイロード長から計算されるCRC(CyclicRedundancy Check、周期的冗長チェック)コードです。 |
| Cycle Count | 現在のコミュニケーション・サイクルの値で、0〜63の値をとります。 |
| ペイロード・セグメントのコンポーネント | 概要 |
| Data | 最大254バイトのデータを含むデータ・フィールドです。静的セグメントで転送されるフレームでは、ペイロード・セグメントの最初の0〜12バイトは、オプションでネットワーク管理ベクタとして使用できます。フレーム・ヘッダのペイロード・プリアンブル・インジケータは、ペイロード・セグメントがネットワーク管理ベクタを含んでいるかどうかを示します。動的セグメントで転送されるフレームでは、ペイロード・セグメントの最初の2バイトは、オプションでメッセージIDフィールドとして使用でき、ノードを受信し、フィールドの内容に応じてデータをフィルタまたは導きます。フレーム・ヘッダのペイロード・プリアンブル・インジケータは、ペイロード・セグメントがメッセージIDを含んでいるかどうかを示します。 |
| トレーラ・セグメントのコンポーネント | 概要 |
| CRC | フレームのヘッダ・セグメントとペイロード・セグメントのすべてのコンポーネントから計算したCRC(Cyclic RedundancyCheck、巡回冗長検査)コードです。 |
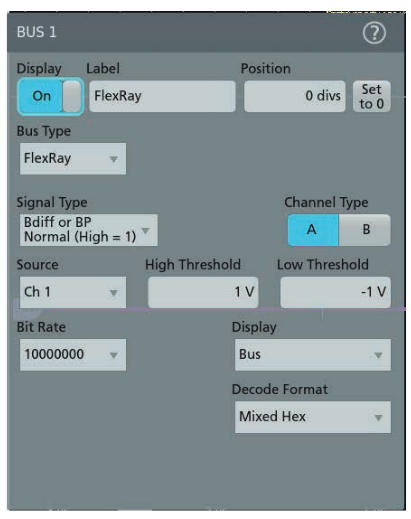
FlexRayバスのデコード設定
デコード設定では、バスを規定するための基本的なパラメータを設定する必要があります。
- FlexRayのチャンネルA、チャンネルBの指定
- プロービングする信号の種類(差動、差動ペアの半分、またはコントローラとバス・ドライバ間のロジック信号)
- 電圧スレッショルド。FlexRayは3値レベルのバスであるため、Tx/Rxでない信号を観測するためには2つのスレッショルドが必要です。これにより、オシロスコープはハイのデータ、ローのデータだけでなく、両方の信号が同じ電圧であるアイドル・ステートを認識することもできます。
- ビット・レート
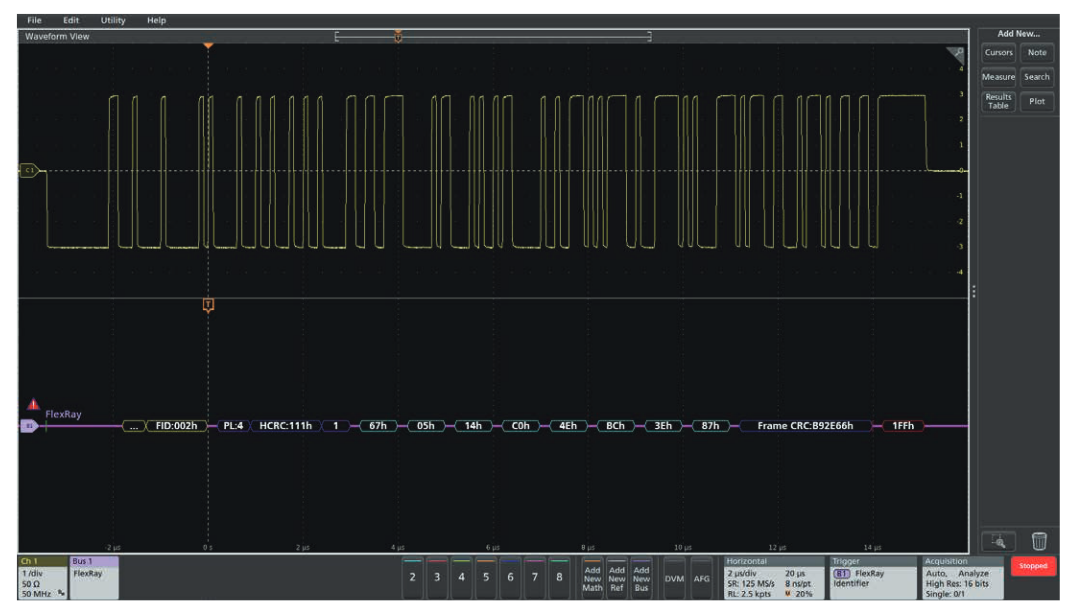
FlexRayのデコードとトリガ
バスを設定すると、オシロスコープは特定のFlexRay バス・イベントだけでなく、同時に発生する信号を検 出し、取込み、表示します。時間的に相関をとって表 示されるため、原因、設計への影響が検証できます。 この例では、フレームID 002 hexにトリガするように 設定されています。
以下の項目に対してFlexRayトリガが可能です。
| トリガ対象 | 概要 |
| Start of Frame | FSS(Frame Start Sequence)の立上りエッジにトリガします。 |
| Indicator Bits | ノーマル、ペイロード、ヌル、シンク、またはスタートアップ・フレームにトリガします。 |
| Identifier | 特定のフレームIDまたはフレームIDの範囲でトリガします。 |
| Cycle Count | 特定のサイクル・カウントの値またはサイクル・カウントの値の範囲でトリガします。 |
| Header Fields | インジケータ・ビット、フレームID、ペイロード長、ヘッダCRC、サイクル・カウントを含む、任意またはすべてのヘッダ・フィールドの値の組合せにトリガします。 |
| Data | 16バイトまでのデータにトリガします。データ・ウィンドウは、非常に長いデータ・ペイロードのフレーム内でユーザ設定のバイト数だけオフセットすることができます。特定の値または特定の値の範囲としてデータを指定することができます。 |
| Identifier & Data | フィールドIDとデータの組合せでトリガします。 |
| End of Frame | 静的フレーム、動的フレームまたはすべてのフレームにトリガします。 |
| Error | ヘッダCRCエラー、トレーラCRCエラー、ヌル・フレーム・エラー、同期フレーム・エラー、スタートアップ・フレーム・エラーなど、さまざまなエラー・タイプにトリガします。 |
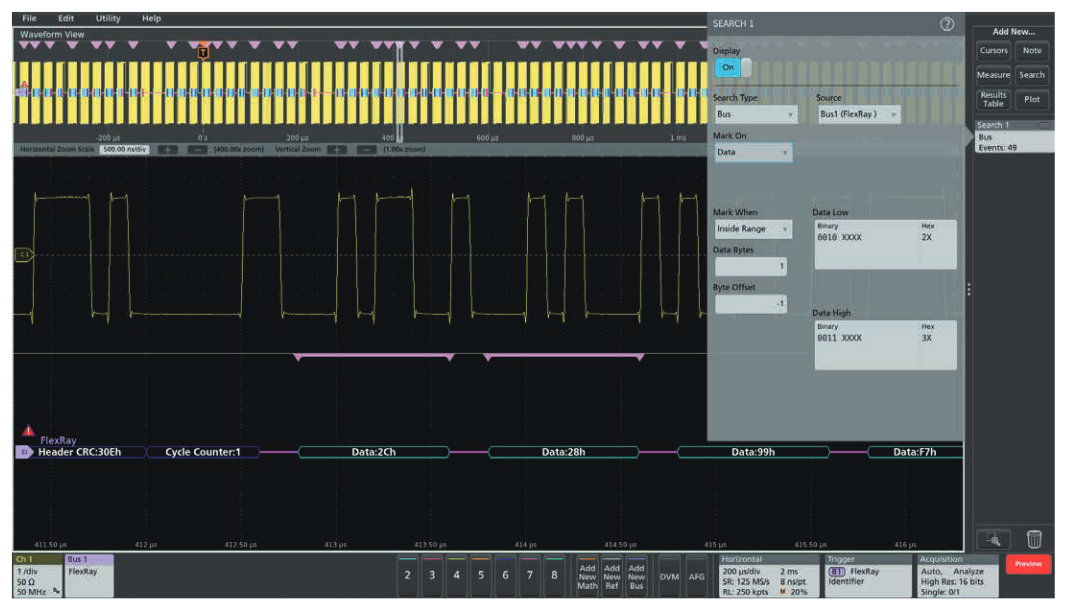
しかし、どのくらいの数のイベントが発生しているのでしょうか。特定の検索条件に合ったすべてのバス・イベントを見つけるには、Wave Inspectorサーチ機能を使用します。設定はバス・トリガの設定と同様であり、特定のバス・イベントを検出し、そのすべてにマークを付けます。
この例では、特定のフレームIDにトリガするように設定されています。約80のFlexRayフレームを取込み、デコードしています。Wave Inspectorのサーチ機能により、数多くのデータから49回の発生にマークを付けています。特定の範囲のデータの値は、ピンクのブラケット・アイコンで表示されています。矢印キーを押すと、マークの付いた値にただちに移動できます。
以上のことを、わずか250,000ポイントのレコード長で実現しています。5シリーズMSOでは、標準のレコード長で62.5Mポイントが取込めます。拡張レコード長では125Mポイントが取込めます。
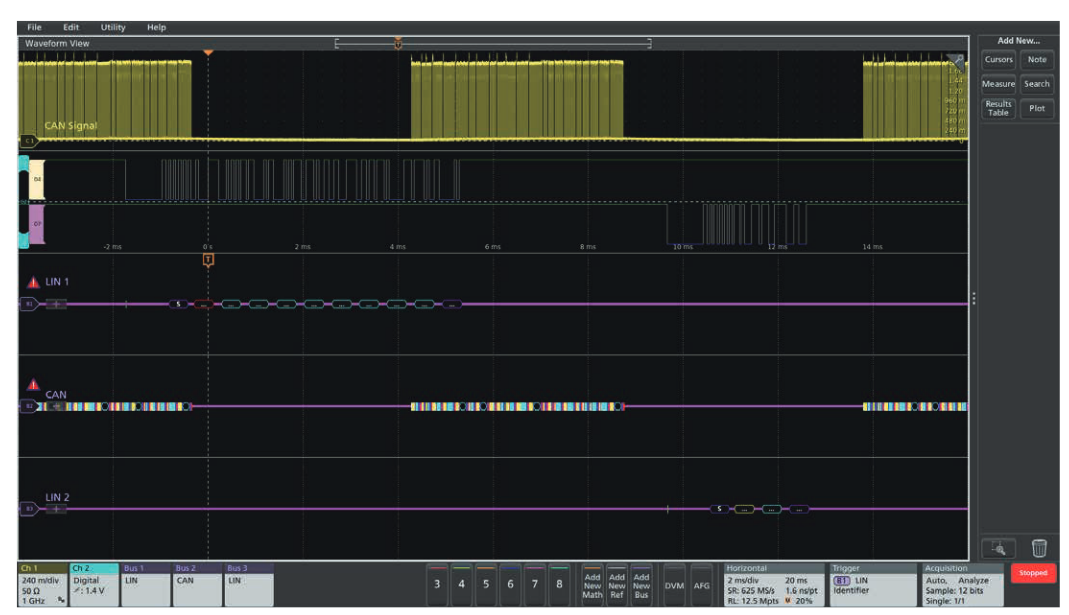
複数のバスの同時デコード
オシロスコープの強力な機能の一つとして、複数のシリアル・バスを設定して同時 にデコードすることができます。先にCANバスの例を説明しましたが、ここでウィン ドウ・コントロールをLINバスで動作させる例を考えてみます。ドライバが助手席 の窓下げボタンを押すと、ドライバ側のドアのLINバスでメッセージが発信され、 中央のCANゲートウェイを通って助手席ドアの別のLINネットワークに送られます。 この場合、バスの一つで関連するメッセージにトリガし、3つのバスすべてを同時 に取込み、デコードできるため、あるバスから別のバスに送られるトラフィックを 簡単に観測できます。この例では、オシロスコープは最初のLINメッセージにトリガ し、3つのバスすべてを取込んでいます。
車載ネットワークの計測に関するご相談はこちら付録 A
テクトロニクスは豊富な機種を用意しており、さまざまな用途に 最適な一台をお選びいただけます。
| MSO/DPO70000シリーズ | DPO7000Cシリーズ | 5シリーズMSO | MSO/DPO5000シリーズ | MDO4000Cシリーズ | MDO3000シリーズ | MSO/DPO2000シリーズ | |
| 周波数帯域 | 33GHz、25GHz、23GHz、20GHz、16GHz、12.5GHz、8GHz、6GHz、4GHz | 3.5GHz、2.5GHz、1GHz、500MHz | 2GHz、1GHz、500MHz、350MHz | 2GHz、1GHz、500MHz、350MHz | 1GHz、500MHz、350MHz、200MHz | 1GHz、500MHz、350MHz、200MHz、100MHz | 200MHz、100MHz、70MHz |
| アナログ・チャンネル数 | 4 | 4 | 4、6、8 | 4 | 4 | 2または4 | 2または4 |
| デジタル・チャンネル数 | 16(MSO) | -- | 8~64(オプション) | 16(MSO) | 16(オプション) | 16(オプション) | 16(MSO) |
| スペクトラム・アナライザ・チャンネル数 | -- | -- | -- | -- | 1(オプション) | 1 | -- |
| レコード長(全チャンネル、ポイント) | 最大62.5M(標準)最大250M(オプション) | 25M(標準)最大125M(オプション) | 62.5M(標準)125M(オプション) | 25M(標準)最大125M(オプション) | 20M | 10M | 1M |
| サンプル・レート(アナログ) | 最高100GS/s | 最高40GS/s | 最高6.25GS/s | 最高10GS/s | 最高5GS/s | 最高5GS/s | 1GS/s |
| カラー・ディスプレイ | 12.1型XGA | 12.1型XGA | 15.6型HD | 10.4型XGA | 10.4型XGA | 10.4型XGA | 7型WQVGA |
| シリアル・バス・トリガ/解析 | I2C sPI RS-232/422/485/ UART CAN LIN FlexRay USB 2.0/3.1 Gen1 HSIC 10/100BASE-T Ethernet MIL-STD-1553 8B/10Bデコード D-PHY MIPI デコード PCI Express デコード |
I2C sPI RS-232/422/485/ UART CAN LIN FlexRay USB 2.0 HSIC 10/100BASE-T Ethernet MIL-STD-1553 8B/10Bデコード D-PHY MIPI デコード PCI Express デコード |
I2C sPI RS-232/422/485/ UART CAN CAN FD LIN FlexRay USB 2.0 10/100BASE-T Ethernet I2S/LJ/RJ/TDM ARINC 429 MIL-STD 1553 |
I2C sPI RS-232/422/485/ UART CAN LIN FlexRay USB 2.0 HSIC 10/100BASE-T Ethernet MIL-STD-1553 8B/10Bデコード D-PHY MIPI デコード PCI Express デコード |
I2C sPI RS-232/422/485/ UART CAN CAN FD LIN FlexRay USB 2.0 10/100BASE-T Ethernet I2S/LJ/RJ/TDM ARINC 429 MIL-STD 1553 |
I2C sPI RS-232/422/485/ UART CAN CAN FD LIN FlexRay USB 2.0 2S/LJ/RJ/TDM ARINC 429 MIL-STD-1553 |
I2C sPI RS-232/422/485/ UART CAN LIN |
| 同時に表示可能なシリアル・バス数 | 16 | 16 | 原則、無制限 | 16 | 3 | 2 | 2 |
CAN・LIN・FlexRayのデコードに最適なオシロスコープ

汎用性の高い4シリーズB MSOは、設計上の困難な課題に対応できる性能と、期待どおりに機能するユーザ・インタフェースを備えています。アップグレードされた新しいプロセッサ・システムを備えるこのオシロスコープでは、さまざまな解析ツールを使用して確度の高い測定を行うことができます。

忠実度に優れた波形、多彩な測定表示、独自のスペクトラム解析、柔軟なプローブ技術により、設計の全体像を把握することができます。世界中のエンジニアに支持されている、直感的なユーザ・インタフェースをご体験ください。

1GHz~10GHzの帯域幅での高速設計のトラブルシューティング/検証。低ノイズ、最大50GS/sのサンプル・レートで正確な測定を実現。6チャンネル/8チャンネルの機種で設計のより詳細な解析が可能。