
Kontaktaufnahme
Live-Chat mit Tektronix-Vertretern. Verfügbar von 9 bis 17 Uhr CET Geschäftstage.
Kontaktieren Sie uns telefonisch unter
Verfügbar von 9 bis 17 Uhr CET Geschäftstage.
Download
Laden Sie Handbücher, Datenblätter, Software und vieles mehr herunter:
Feedback
Debugging von ECUs mit automatischer Dekodierung & Triggerung
Was ist der CAN-Bus?
Das Controller Area Network (CAN) ist eine Busstruktur, die ursprünglich für Anwendungen im Automobilbereich entwickelt wurde, aber auch in anderen Bereichen Einzug gehalten hat. Der CAN-Bus ist eine symmetrische (differenzielle) Zweidraht-Schnittstelle, die je nach Anwendung unterschiedliche Kabeltypen verbindet. Der Standard definiert mehrere unterschiedliche Datenraten, wobei für CAN 1 Mb/s die schnellste ist. Die neuere Variante, CAN FD (Flexible Datenrate), verfügt über höhere Übertragungsgeschwindigkeiten von bis zu 10 Mb/s und ermöglicht gleichzeitig eine höhere maximale Datenfeldlänge für Paketnutzlasten. Zur Aufrechterhaltung der Signalqualität benötigt der Bus einen Abschlusswiderstand von 120 Ω an jedem Kabelende zur Sicherstellung der Impedanzabstimmung.
Seit seiner Einführung in den 1980er Jahren wird der CAN-Bus für die Datenübertragung zwischen elektronischen Steuergeräten (ECUs) und mit Fahrzeugsensoren genutzt.
CAN-Bus im vernetzten Fahrzeug
In den letzten Jahren hat die Menge der Daten, die in Kraftfahrzeugen erzeugt, übertragen und empfangen werden, erheblich zugenommen und wird auch künftig weiter ansteigen. Viele moderne Fahrzeuge enthalten mehr als 80 elektronische Steuergeräte (ECUs), die über verschiedene Busnetzwerke miteinander vernetzt sind. Diese Zahl wird in den kommenden Jahren voraussichtlich auf über 100 steigen, zumal einige Luxusfahrzeuge bereits 150 ECUs nutzen.
Nicht nur die Verarbeitung diverses Sensor- und Aktor-Signale, sondern auch die zunehmende Integration unterschiedlicher Subsysteme im Fahrzeug führen dazu, dass viele Steuergeräte mittlerweile auf mehreren seriellen Bussen kommunizieren. Beispielsweise ist es üblich, dass ein Steuergerät sowohl über CAN (für kritische Systeme) als auch über LIN (für Steuerungen mit geringerer Priorität, wie z. B. Fenster und Spiegel) kommuniziert.
Fehlersuche mit einem CAN-Bus-Decoder und anderen Tools
Da die Sicherheit des Fahrers davon abhängt, dass diese Systeme ordnungsgemäß kommunizieren, muss unbedingt sichergestellt sein, dass ein CAN-Bus korrekt konfiguriert ist. Zum Glück ist es einfach, einen CAN-Bus zu dekodieren, und Fehler in einem CAN-Bus lassen sich leicht finden und beheben, wenn man die richtigen Werkzeuge für die CAN-Bus-Dekodierung hat, beispielsweise ein Mixed-Signal-Oszilloskop. In dieser kurzen Anleitung werden wir Tipps für Fehlersuche und -behebung geben und die Geräte beschreiben, die Sie brauchen, um diese Aufgabe schnell zu erledigen.
CAN-Bus-Dekodierung, -Auslösung und -Suche
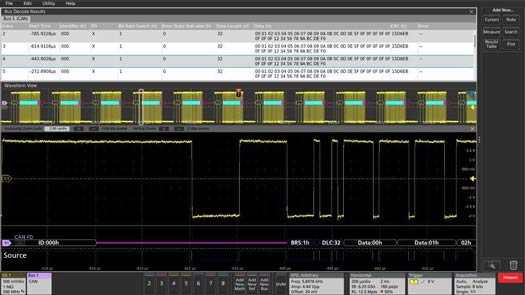
CAN-FD-Signal an Kanal 1, das decodiert und als Bus-Kurvenform (unten) bzw. als Ereignistabelle (oben) dargestellt wird.
Debuggen des dekodierten CAN-Busprotokolls
Die manuelle Dekodierung von seriellen Busprotokollen ist zeitaufwändig und fehleranfällig. Tektronix Automotive Pakete bieten eine einfache automatisierte Dekodierung und Triggerung für die gängigen Busprotokolle für Steuergeräte wie CAN, CAN FD, LIN und FlexRay.
Suche nach und Behebung von Signalstörungen
Die Protokolldekodierung ist jedoch erst der Anfang. Die Fehlersuche bei Problemen, wenn ein Bus nicht oder schlimmstenfalls nur unregelmäßig funktioniert, geht weit über den reinen Datenverkehr hinaus bis in das Gebiet der Signalintegrität.
Häufig werden diese Probleme, die ihre Ursachen in der Signalintegrität auf der physikalischen Schicht haben – wie Übersprechen, Rauschen und schlechte Anpassung – am effektivsten durch die Signalanalyse erkannt.
Ein Oszilloskop erlaubt dem Ingenieur den analogen Kurvenverlauf von Bussignalen zu untersuchen, um die Signalqualität und das Rauschen zu bewerten. Zudem können mehrere Signale gleichzeitig untersucht werden, um Interaktionen auszumachen und ein mögliches Übersprechen auf diese Weise zu identifizieren.
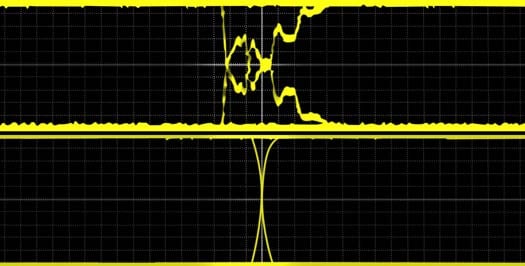
Für den CAN-Bus ist ein Abschluss von 120 Ω erforderlich. Ein nicht abgeschlossener Bus führt zu einer schlechten Signalqualität (oberes Signal).

Steuergeräte kommunizieren über CAN, LIN und andere Busse sowie direkt mit Sensoren und Aktoren.
Visualisierung von mehreren Kanälen/Sensoren/Aktoren
Durch die Komplexität der Multibus- und Multi-Sensor-/Aktor-Systeme ist es oft schwierig, einen Überblick über die Arbeitsumgebung zu erhalten.
Die meisten Oszilloskope von Tektronix erlauben es dem Anwender, mehrere Busse und Steuersignale gleichzeitig zu betrachten. Mixed-Signal-Oszilloskope ermöglichen die Nutzung digitaler Kanäle für die Bus-Dekodierung, wodurch analoge Kanäle für die Bewertung der Signalqualität frei bleiben. Das MSO der Serie 5 ist dank seiner hohen Kanalanzahl, der FlexChannel-Eingänge und des großen HD-Displays besonders gut für den Einblick in komplexe Steuergeräte geeignet.







FAQs – Häufig gestellte Fragen
Was ist ein CAN-Bus-Dekoder?
Ein CAN-Bus-Dekoder ist ein Gerät, das die Signale interpretieren kann, die über einen CAN-Bus (Controller Area Network) gesendet werden. CAN ist ein Kommunikationsnetzwerk, das in modernen Fahrzeugen und anderen komplexen Systemen zum Einsatz kommt. Der Dekoder kann Informationen wie Geschwindigkeit, Drehzahl, Temperatur und andere Daten extrahieren, die über den CAN-Bus übertragen werden.
Was sind die Vorteile eines CAN-Bus-Dekoders?
Ein CAN-Bus-Dekoder kann Echtzeitzugriff auf wichtige über den CAN-Bus übertragene Daten bieten, die für verschiedene Zwecke wie Diagnose, Leistungsoptimierung und Datenanalyse verwendet werden können. Er kann auch dabei helfen, Probleme mit den Systemen und Komponenten des Fahrzeugs zu erkennen und zu diagnostizieren, was eine schnellere und genauere Fehlerbehebung ermöglicht.
Wie funktioniert ein CAN-Bus-Dekoder?
Ein CAN-Bus-Dekoder funktioniert, indem er die über den CAN-Bus übertragenen Signale abfängt und die Datenpakete mit einer speziellen Software dekodiert. Der Dekoder kann die Daten dann in einem benutzerfreundlichen Format anzeigen, so dass sie leicht zu interpretieren und zu analysieren sind.
Welche Art von Daten können mit einem CAN-Bus-Dekoder dekodiert werden?
Ein CAN-Bus-Dekoder kann eine Vielzahl von Daten extrahieren, die über den CAN-Bus übertragen werden, einschließlich Motordrehzahl, Drosselklappenstellung, Fahrzeuggeschwindigkeit, Kühlmitteltemperatur, Kraftstoffstand und mehr. Welche Daten jeweils dekodiert werden können, hängen von Marke und Modell des Fahrzeugs und vom Typ des verwendeten CAN-Bus-Dekoders ab.
Kann ein CAN-Bus-Dekoder für jedes Fahrzeug verwendet werden?
Ein CAN-Bus-Dekoder kann für die meisten modernen Fahrzeuge verwendet werden, die einen CAN-Bus (Controller Area Network) verwenden. Die Kompatibilität kann jedoch je nach Marke und Modell des Fahrzeugs und der Art des verwendeten CAN-Bus-Dekoders variieren. Es ist immer am besten, vor dem Erwerb eines CAN-Bus-Dekoders die Herstellerangaben zu prüfen.
Gibt es verschiedene Arten von CAN-Bus-Dekodern?
Ja, es gibt verschiedene Arten von CAN-Bus-Dekodern auf dem Markt, die von einfachen Handheld-Geräten bis hin zu fortschrittlicheren softwarebasierten Systemen reichen. Welcher Dekodertyp für Sie am besten geeignet ist, hängt von Ihren Anforderungen und der Komplexität der Daten ab, die Sie aus dem CAN-Bus extrahieren müssen.
Kann ein CAN-Bus-Dekoder dazu beitragen, die Fahrzeugleistung zu verbessern?
Ja, ein CAN-Bus-Dekoder kann zur Überwachung und Analyse von Fahrzeugleistungsdaten verwendet werden, was dazu beitragen kann, Bereiche mit Verbesserungspotenzial zu identifizieren und die Leistung des Fahrzeugs zu optimieren. Er kann beispielsweise helfen, die Leistung des Motors durch Anpassung des Kraftstoff- und Zündzeitpunkts zu optimieren oder Bereiche des Fahrzeugs zu identifizieren, die Luftwiderstand verursachen und den Kraftstoffverbrauch erhöhen.
Wie richte ich die CAN-Bus-Dekodierung ein?
Die Einrichtung des CAN-Bus-Dekodierungstools Ihrer Wahl ist einfach. Unter diesem Link finden Sie eine Anleitung und ein Video zum Einrichten eines CAN-Bus-Dekoders am Beispiel eines Tektronix Oszilloskops.